Yesterday, when we left of we had just upgraded to the PI four, and with the deadline coming up for the competition, the rest of the snowflakes started shouting at me to squeese one last blog; so it’ll be short, it will be jucy and it will almost certainly be not fun for me. So here we go.
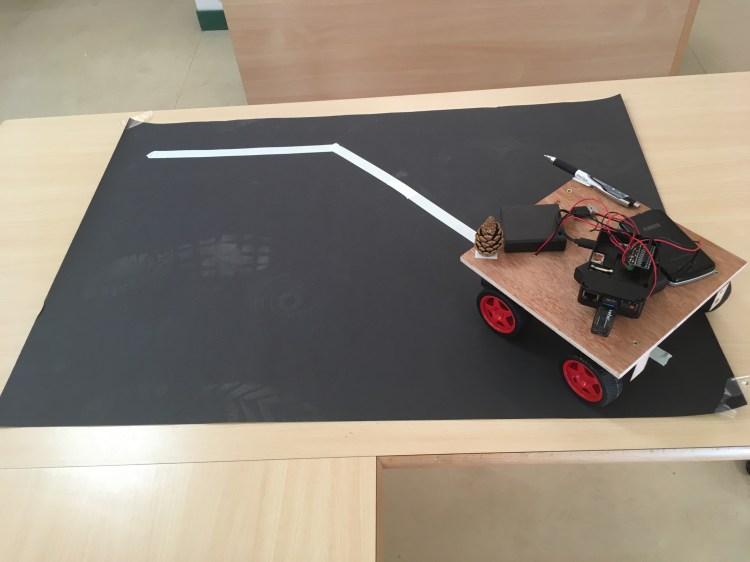
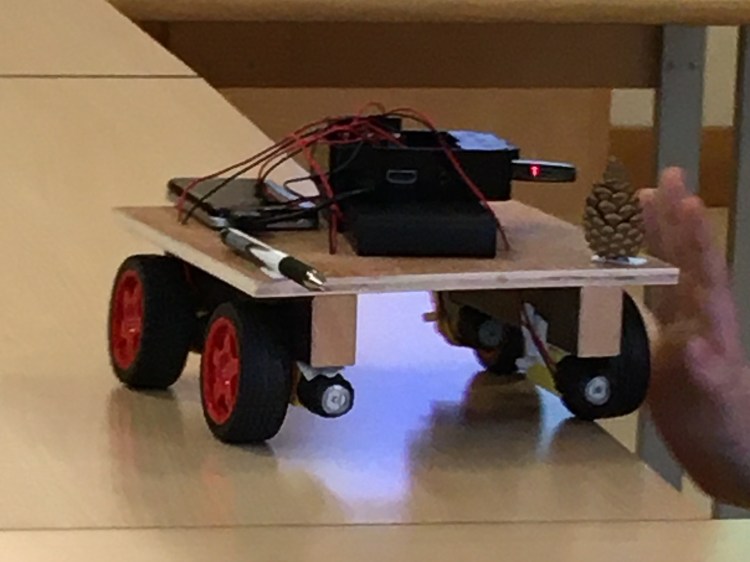
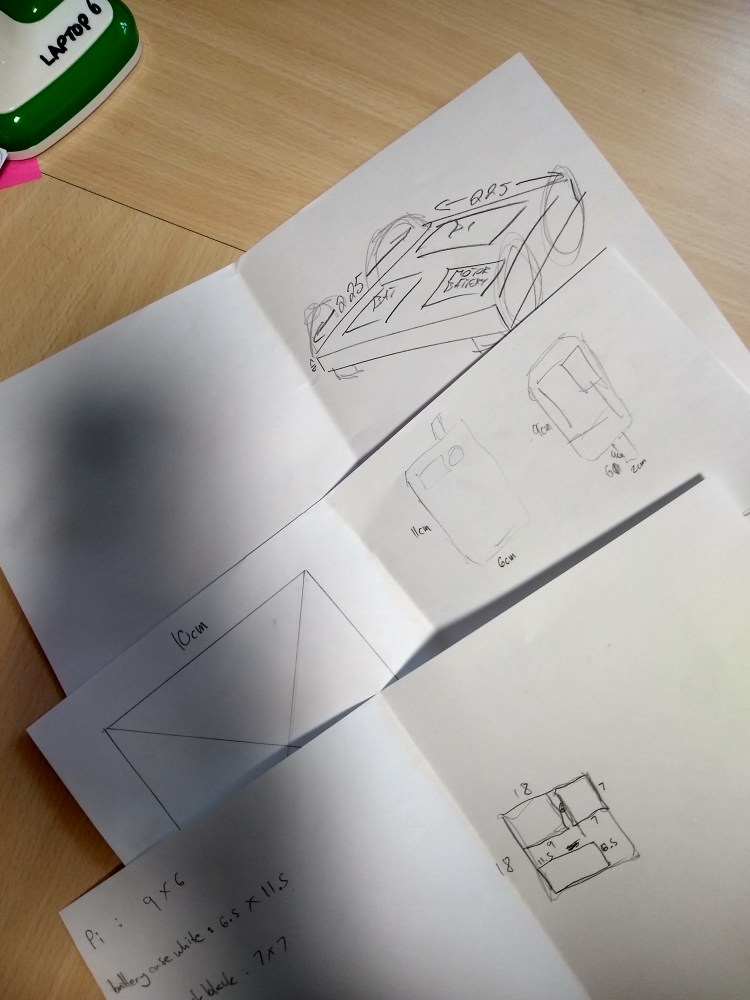
With the completion of the PI, the snowflakes turned their adventuring attention to the next challenge, the Eco Disaster (did I mention that this Competition was disaster themed) or as I like to call it the pushy muckbober challenge. Why do I like to call It this name, because in this challenge, the snowflakes have to build a scoop to push ‘barrels’ around a course of some sort. So breaking out the saws and the drills again, the snowflakes thought it was about time to cue the music.

So as the scoop entered development the other half of the snowflakes began to turn their heads to wards decoration, in a disaster theme of course. So we were thinking something like… Oh wait, what, Just in the disaster themed competition, PI wars, has just been shut down by a disaster, how ironic. So what does this mean, it means that I don’t have to do any more work, yes, oh yea and also that we have more time to work on the illusive decorations until, hopefully when corona decides to shove off, the competition is reinstated on a later date.
So what’s next, of course I will be looking out for info on when the competition is going to start up again so keep an eye out for an update on that. But in the mean time I have started work on two more serious posts that will take much more time and care to produce. They are in order as follows, the Jobless Generation and Sentience. So what am I going to do now, I am am going to roll up a new character sheet for DND (Dungeons and Dragons, the best game ever) and so in the meantime stay snowflakey.