Nowadays camera’s are everywhere, in every ally, above every counter and on every person. Every individual meshes together to make one great surveillance system of moving camera’s; as it is so easy for state powers to access our phones and incorporate them into their eyes and ears. But, as some of you may very well be wondering, how has this got anything to do with robots; well apart from a dystopian future of hovering drones that monitor our every move (I am being silly, that would never happen, our phones do that for them already), we decided to add one more camera to that pervasive system.
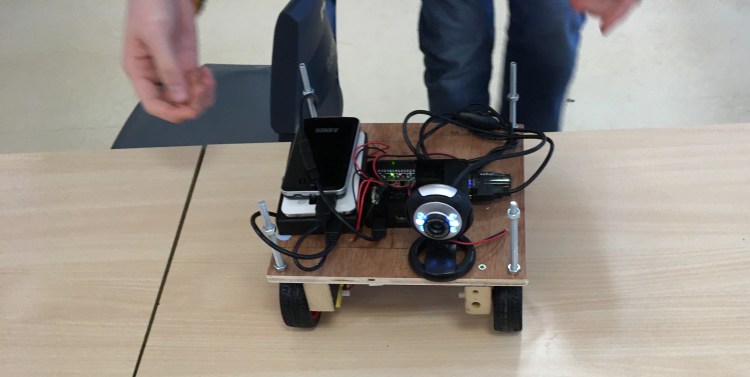
This might be the time to tell you, if your here for a deep and Informative discussion of surveillance, this is not the blog for you but feel free to stick around to read the chronical of a not so epic, robotics building team and their struggle to build a robot, that hopefully does not fall apart at the PI wars competition on the 28th of march. Anyway, I was talking about something, Oh yes, Jeff (our robot) we had a problem; you see one of the challenges at the PI wars competition in Cambridge is a blind driver challenge. We have to drive the robot around a course in one of three ways; one, we code Jeff to drive around the course (way to complicated, + we are just to lazy to do that), two, we have some one shout directions to the driver (I mean we find it hare to understand each other face to face) and finally, three, to give Jeff an eye. Now I know what (some of) you are saying, ‘Jeff already has an eye, his line reading sensor already gives him vision’, shh, eyless jeff doesn’t like that. So we decided to give Jeff an eye, one that we could see through. Now coding a camera is quite complicated, but look on the bright side, I did not have to do it, the other snowflakes had to.
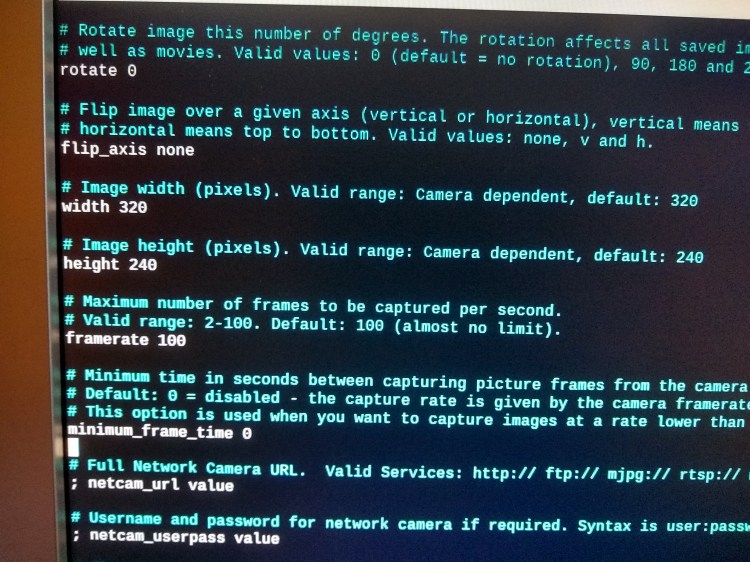
Continuing on, they used this platform called motion to manage the camera, hooked it up to run 10 frames per second and a resolution of 320 X 160 and for the most part Jeff Worked. There was one problem thought, can you guess it, aye, that day the giant of problems decided to hurl the bolder of Latency at us. It was not fun. The camera worked, but for only up to 3 meters away from the screen the feed was running to; then it would become choppier that a storm, a thunderbolt and an explosion’s all coinciding in exactly the same place right out in the middle of the ocean. It was as they say, completely useless. So what was the issue, well to sum it all up our model of the pi was to outdated, small and underpowered to run the camera, we were going to have to upgrade.
Join us next time, for the final blog before the pi wars competition, will we fail or will we win. I don’t know, don’t ask me and there is still one week to go. Any way stay safe and stay snowflakey.
